Mechanical design
Mechanical design must comply with the rules of the Sumo Challenge competition in the following categories: Humanoid Sprint and Freestyle.
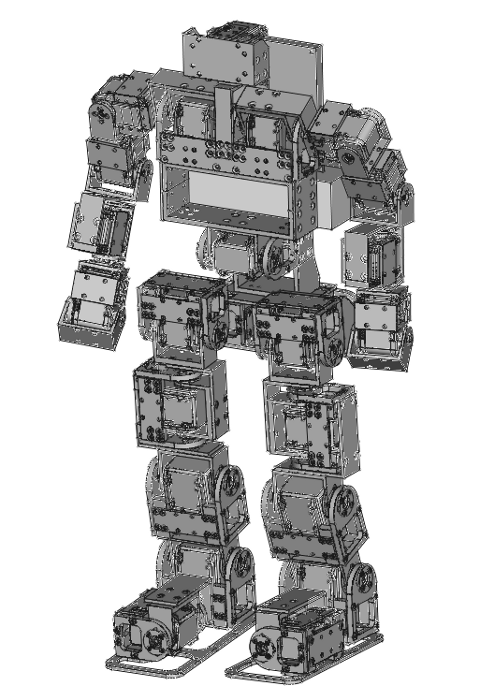
The robot should as accurately as possible reflect human body movements and physique.
It must provide some space for main controller installation, space for mounting two video cameras and two lithium-polymer batteries.
Construction must be dynamically stable, maintain balance in a standing position and should allow the robot to do the following: squats, push-ups, cartwheels, forward rolls, twines, bending and running.
It should have hands with the ability to grab small and relatively light objects as well.
BROWSE ROBOT COMPONENTS
It must provide some space for main controller installation, space for mounting two video cameras and two lithium-polymer batteries.
Construction must be dynamically stable, maintain balance in a standing position and should allow the robot to do the following: squats, push-ups, cartwheels, forward rolls, twines, bending and running.
It should have hands with the ability to grab small and relatively light objects as well.
BROWSE ROBOT COMPONENTS
Electronics
The ABASTROBOT project assumes creation of robot which will be able to interact with people. For this purpose we need a platform powerful enough to process sounds and images.
The controller should also provide mobility to robot. This literally means controlling over 20 independent actuators simultaneously according to recorded choreography and the informations coming from the sensors.
The controller should also provide mobility to robot. This literally means controlling over 20 independent actuators simultaneously according to recorded choreography and the informations coming from the sensors.