Konstrukcja mechaniczna
Konstrukcja mechaniczna musi być zgodna z regulaminem zawodów Sumo Challenge w kategoriach Humanoid Sprint oraz Freestyle.
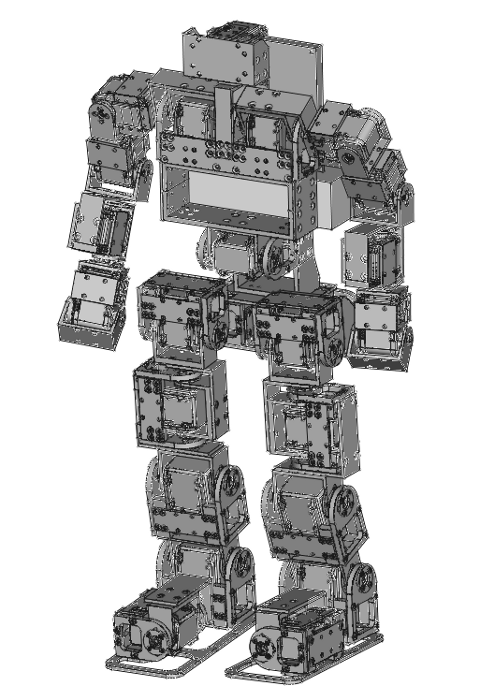
Powinna możliwie wiernie odzwierciedlać budowę oraz ruchy człowieka.
Musi posiadać przestrzeń niezbędną do montażu sterownika, dwóch kamer oraz dwóch akumulatorów litowo-polimerowych.
Konstrukcja musi być stabilna dynamicznie, utrzymywać równowagę w pozycji stojącej oraz powinna pozwolić robotowi na wykonanie następujących czynności: przysiad, pompka, gwiazda, przewrót, szpagat, ukłon, bieganie. Powinna też posiadać dłonie umożliwiające chwytanie niewielkich i względnie lekkich przedmiotów.
PRZEGLĄDAJ KOMPONENTY ROBOTA
Musi posiadać przestrzeń niezbędną do montażu sterownika, dwóch kamer oraz dwóch akumulatorów litowo-polimerowych.
Konstrukcja musi być stabilna dynamicznie, utrzymywać równowagę w pozycji stojącej oraz powinna pozwolić robotowi na wykonanie następujących czynności: przysiad, pompka, gwiazda, przewrót, szpagat, ukłon, bieganie. Powinna też posiadać dłonie umożliwiające chwytanie niewielkich i względnie lekkich przedmiotów.
PRZEGLĄDAJ KOMPONENTY ROBOTA
Elektronika
Projekt ABASTROBOT zakłada stworzenie w robota, który będzie komunikować się z ludźmi. Dlatego niezbędna jest platforma o dostatecznie dużej mocy obliczeniowej, aby przetwarzać dzwięki i obrazy.
Kontroler powinien także zapewnić robotowi mobilność. Przekłada się to na jednoczesne sterowanie ponad dwudziestoma niezależnymi serwomechanizmami, zgodnie z nagraną choreografią oraz informacjami pochodzącymi z czujników.
Kontroler powinien także zapewnić robotowi mobilność. Przekłada się to na jednoczesne sterowanie ponad dwudziestoma niezależnymi serwomechanizmami, zgodnie z nagraną choreografią oraz informacjami pochodzącymi z czujników.